嵌入式项目中打造自己的utils库-二进制转换¶
更新日期: 2022-08-10
- 2022-08-10 更新
Cyber & Robot 授权发布
前言¶
在嵌入式开发中,不可避免要和驱动打交道。很多外设的寄存器都是使用2进制形式进行配置的。
如果每次配寄存器,或回顾以前代码,对着16进制凭借大脑或者计算器来做2进制转换,就会非常麻烦。那么何不写一些代码,让2进制看起来更直观呢。
虽然GCC是支持0b开头的语法的(参考0x),但过于依赖会降低可移植性,不如自己手写一个吧。
实现¶
下面直接贴代码:
#define BIN(n) ((0x##n>>21 & 0x80) | \
(0x##n>>18 & 0x40) | \
(0x##n>>15 & 0x20) | \
(0x##n>>12 & 0x10) | \
(0x##n>>9 & 0x08) | \
(0x##n>>6 & 0x04) | \
(0x##n>>3 & 0x02) | \
(0x##n & 0x01) )
示例:
结果:
代码分析¶
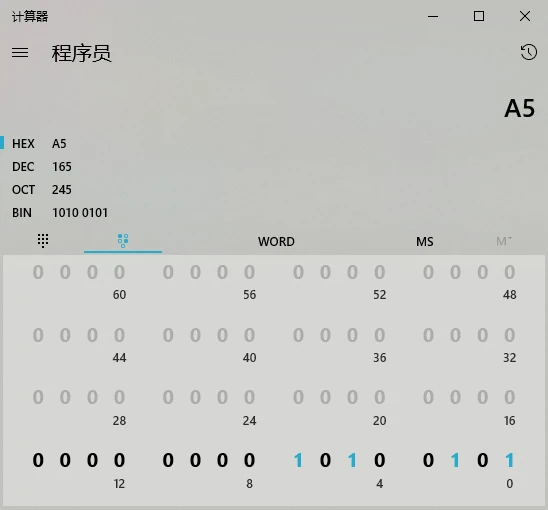
uint8_t val = BIN(10100101)
// 宏展开
((0x10100101>>21 & 0x80) | \
(0x10100101>>18 & 0x40) | \
(0x10100101>>15 & 0x20) | \
(0x10100101>>12 & 0x10) | \
(0x10100101>>9 & 0x08) | \
(0x10100101>>6 & 0x04) | \
(0x10100101>>3 & 0x02) | \
(0x10100101 & 0x01) )
// 用2进制表示
((0x10100101>>21 & 0b10000000) | \
(0x10100101>>18 & 0b01000000) | \
(0x10100101>>15 & 0b00100000) | \
(0x10100101>>12 & 0b00010000) | \
(0x10100101>>9 & 0b00001000) | \
(0x10100101>>6 & 0b00000100) | \
(0x10100101>>3 & 0b00000010) | \
(0x10100101 & 0b00000001) )
注意:此时10100101是一个16进制的数字,各位数据如下:
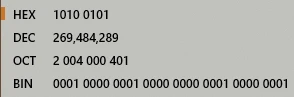
// 2进制表示和移位过程
0b00010000000100000000000100000001 >> 21 & 0b10000000 = 0b00010000000 & 0b10000000 = 0b10000000
0b00010000000100000000000100000001 >> 18 & 0b01000000 = 0b00010000000100 & 0b01000000 = 0b00000000
0b00010000000100000000000100000001 >> 15 & 0b00100000 = 0b00010000000100000 & 0b00100000 = 0b00100000
0b00010000000100000000000100000001 >> 12 & 0b00010000 = 0b00010000000100000000 & 0b00010000 = 0b00000000
0b00010000000100000000000100000001 >> 9 & 0b00001000 = 0b00010000000100000000000 & 0b00001000 = 0b00000000
0b00010000000100000000000100000001 >> 6 & 0b00000100 = 0b00010000000100000000000100 & 0b00000100 = 0b00000100
0b00010000000100000000000100000001 >> 3 & 0b00000010 = 0b00010000000100000000000100000 & 0b00000010 = 0b00000000
0b00010000000100000000000100000001 & 0b00000001 = 0b00010000000100000000000100000001 & 0b00000001 = 0b00000001
最后各位相加(与),是不是组合得到0b10100101(0xA5)了?
课外小知识¶
不知道大家对宏定义的#号语法是否还有印象,这里一起复习一下:
/*
单个#
作用是将#后面的参数转成字符串
*/
#define PRINT_VAR(a) printf("%s:%d\n", #a, a)
uint8_t length = 123;
PRINT_VAR(length);
// 输出:length:123
/*
两个##
作用是连接##前后两部分内容
*/
#define VAR_DEF(a) int _var_##a
#define VAR(a) _var_##a
VAR_DEF(length);
VAR(length) = 123;
printf("length:%d\n", VAR(length));
// 输出:length:123
应用¶
随意打开一个传感器的数据手册,里面对寄存器的配置说明长这样:
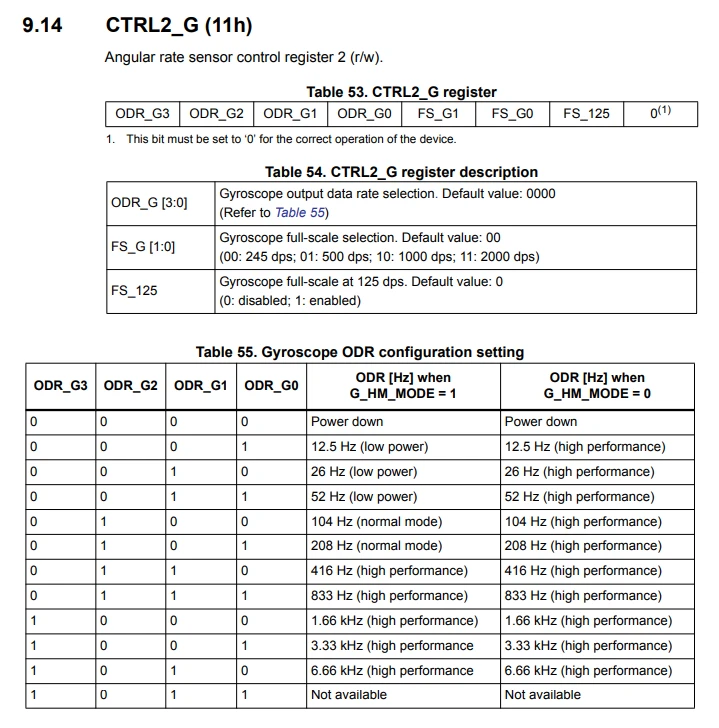
用上刚才的代码,做如下配置:
陀螺仪输出速率:104Hz(0100)
陀螺仪量程:1000dps(10)
另外一个不管它,保持默认为0。
是不是比写0x48直观多了,同时也方便下次修改配置。再把寄存器注释写在代码上,下次维护代码一目了然。
/*
ODR_G [7:4] Gyroscope output data rate selection. Default value: 0000
ODR_G0 ODR [Hz] when G_HM_MODE = 1 ODR [Hz] when G_HM_MODE = 0
0 0 0 0: Power down Power down
0 0 0 1: 12.5 Hz (low power) 12.5 Hz (high performance)
0 0 1 0: 26 Hz (low power) 26 Hz (high performance)
0 0 1 1: 52 Hz (low power) 52 Hz (high performance)
0 1 0 0: 104 Hz (normal mode) 104 Hz (high performance)
0 1 0 1: 208 Hz (normal mode) 208 Hz (high performance)
0 1 1 0: 416 Hz (high performance) 416 Hz (high performance)
0 1 1 1: 833 Hz (high performance) 833 Hz (high performance)
1 0 0 0: 1.66 kHz (high performance) 1.66 kHz (high performance)
1 0 0 1: 3.33 kHz (high performance 3.33 kHz (high performance)
1 0 1 0: 6.66 kHz (high performance 6.66 kHz (high performance)
1 0 1 1: Not available Not available
FS_G [3:2] Gyroscope full-scale selection. Default value: 00
(00: 245 dps; 01: 500 dps; 10: 1000 dps; 11: 2000 dps)
FS_125[1] Gyroscope full-scale at 125 dps. Default value: 0
(0: disabled; 1: enabled)
Reserve[0] 0
*/
uint8_t ctrl2_g_config = BIN(01001000);
i2c_reg_write(&dev, 0x11, ctrl2_g_config);
但需要注意的是,此方法仅支持8位2进制的表示,要支持16位、32位的2进制,一是参数存储字节会超32位;二是存在字节序的问题。有兴趣的朋友可以自己扩展实现一下。
End¶
本篇文章只有一行代码,但却是嵌入式开发中一个非常有用的工具,通过这个工具,可以节省很多时间。 c语言的开发,自身的语法糖并不多,而嵌入式的开发中,IDE带来的辅助效果更匮乏。所以为了提升效率,建议大家收集自己常用的工具代码,整理成模块,多次复用起来,这也是标题utils库的由来。 打造utils库会是一系列的文章,会跟大家分享有用的代码。多数会以宏定义的方式实现,也会有c代码级别的实现。期待我们下一次见面。
本文也发布在